Simplifying Contributions – Mech Interface
At the pace of current conflicts, I don’t think it sounds pessimistic to point out that resources are surprisingly strained. This is most notable in the labor division – the trouble with pulling recruitment from refugees of other worlds is a simple one. Due to the fact that Verorox is a combination of technologies from dimensions spread far and wide, it becomes a strained process ensuring equal knowledge and training on any particular end regardless of what it is the individual seeks. A soldier is particularly hard set these days if he has no prior training, as his task is to be instantaneous relief, but in order to be effective, he has to have a at least a basic set of skills to be anything more than a hindrance. Thus comes the setup for one of my current projects .
We live in an age where technology can not only teach us, but often time make up for our lack of experience while we do so. A standard mechanized armor unit is an incredibly powerful tool depending on both the model and the pilot. Converting ourselves into gigantic, metallic covered muscle, as a metaphor, allows us to do so so much. The trouble within, however, comes from the experience necessary to pilot such a craft effectively. Trying to translate human controls to a series of levers, buttons, pedals and the like is far more difficult than say, a car or boat or something with just a two-dimensional plain of thrust and direction, and the argument could even be made for aerial craft.
So I made a simple observation – one that has in fact been made before, but has often been made on a personal, expert level. Most standard mechanoids are, in fact, just shaped as humanoids might be. Why must our movements and input be so drastic from this basic setup? There have been several instances of extremely customized interfaces for very mobile mechanoids to react directly to the input of their specific pilot, that is, that person’s bodily motion. To repeat this process for every would-be pilot, however, would be even more costly in both time and resources than our current pilot programs. But we are not seeking to outfit every pilot with something extremely customized. For most Marshalship Cadets or First Rank we are in fact simply trying to offer a mass-produced system for the average soldier. We need to create a basic skeletal interface for a generic mechanoid model that will allow a newly recruited soldiers to, quite simply, jump right in and join the fray.
But that request is exactly what makes this problem so EASY. That problem has already been solved a long time ago, by none other than 3D environment modelers. The problem came about when trying to figure an efficient means of colliding a physique to a polygon mesh. It was an extremely tedious and costly process to retrofit a working physique to a set of arbitrary polygons every time one created a new 3D model. The solution devised was thus. You’ll have to pardon my rough simulation.
First step, create your object mesh.
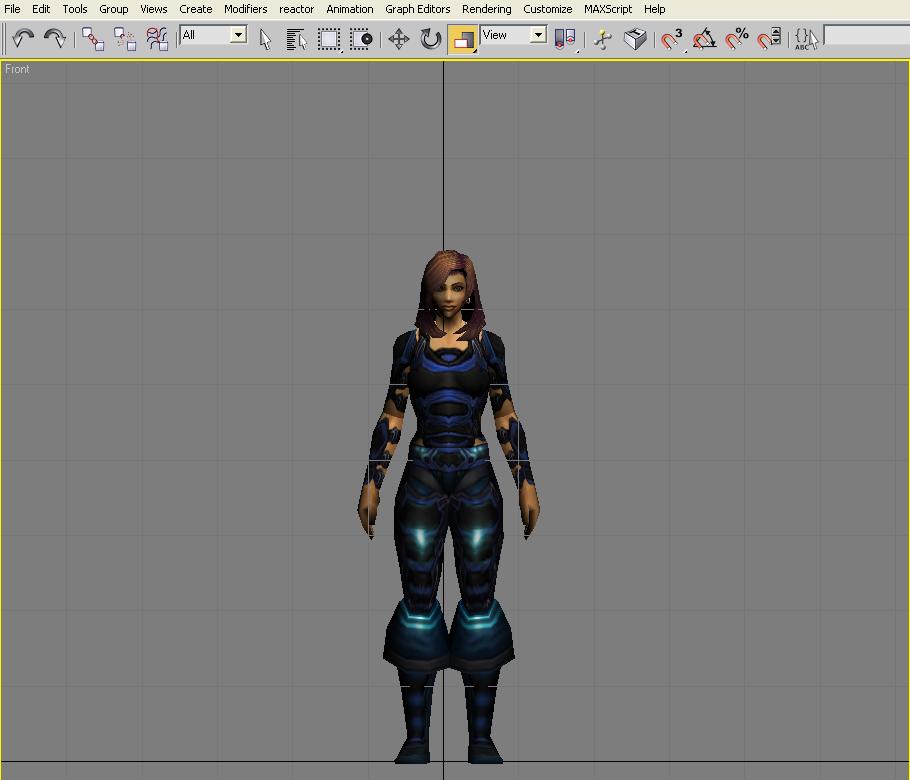
The mesh is thus outlined in a series of vertexes representing the breakdown of individuals two dimensional plains, polygons simply.
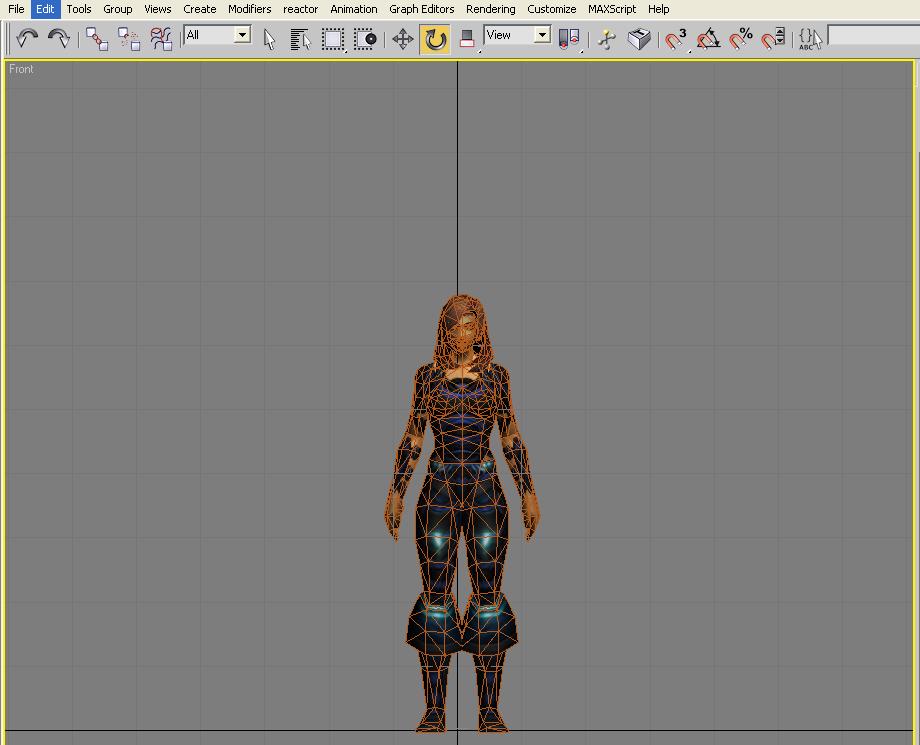
Next a generic object representing a skeletal structure is overlapped with this mesh. This skeletal structure is also referred to as a biped.
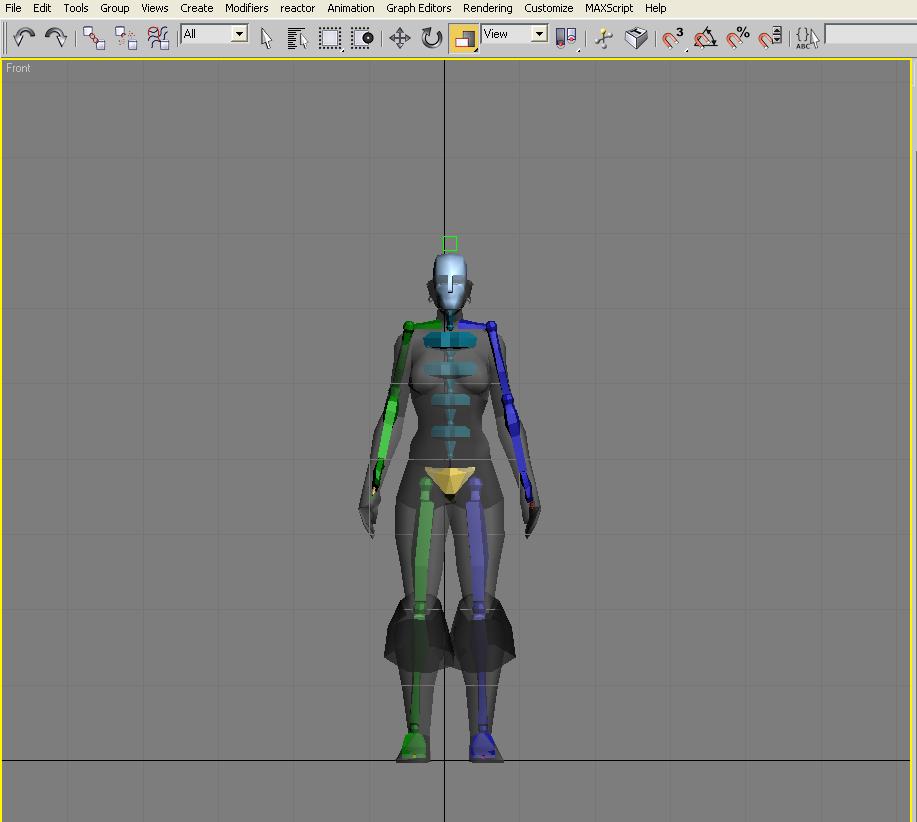
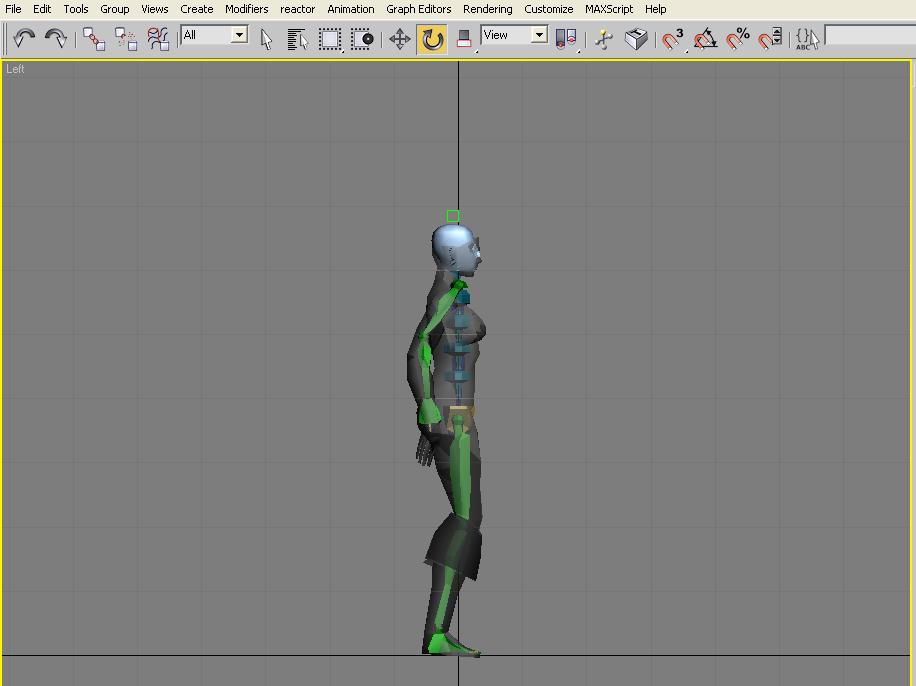
Now, with the proper fitting, a physique representing this bone structure can be automatically generated. Each vertex of the polygon mesh can then be attached to belong to a specific portion of this physique, and when the bone structure is animated, will follow in suit depending upon that vertex’s specific settings. The common settings are whether or not the vertex is deformable, stretching the length of its edge with surrounding vertexes, or not . This is where my observation comes in. Simply put, a standard design mechanoid is nothing more than a set of metallic polygons, all of whose vertexes could be represented as non-deformable. A setup like the following could then be easily generated.
The final interface would only need be the following process.
- Convert the physical form of a mechanoid to a simulated mesh, similar to above.
- Create a generic biped suit, a few different sizes and stretchable fits for average pilot builds.
- Run the physique generation process on this biped to connect it to the mesh. Now any actions made by a pilot who fits this suit will be translatable to the mesh.
- Forward simulated coordinate changes of the mesh to the physical unit itself.
You now carry a system capable of mimicking human motion. Obviously, the common build of mechanoid for field combat or cultivation is nowhere near as quick or capable as the human body. But this process drastically reduces the necessity for immediate pilot training upon recruitment. Rather than the standard length of course, it could easily be retrofitted to a couple hour course detailing the methods of keeping your movements ‘stiff’ so as to try to remain somewhat non-deforming as the mech itself, as well as learning to interact with the H.U.D. displaying current parameters of speed and vector limitations of the unit itself. Certainly, pilot instructions for proper units should still be an eventual requirement for those planning to remain specifically within that field, but this broadens the perspective choice of bulk pilots in emergency situations.
Perhaps the best initial use of this system will not even be for combat, but will become a tool for cultivators being sent out to the recently proposed list of planets to be colonized and used for further resources. I’ll be looking to forward this proposal to the CoRe advisory council once I’ve gotten the proper proof and credentials. If any engineers aboard would be interested in helping me create a prototype mechanoid, I can focus on finalizing the forwarding interfaces, and we can get the schematics ready for generic use by the time the workers are ready to make their move. Please contact me immediately!
-Crono
March 20th, 2009 at 6:50 pm
While clearly not an engineer on board the Blaze, I have a few comments and questions on your base design. In no particular order:
*Instead of the need to instruct a pilot subject counter-intuitive motions (‘stiff’), would it be possible to build the mesh suit for the subject with inflexible rods or a stiffer agent than mesh? This would actually force the subject’s motions (more natural) than a learned motion that could be forgotten in the heat of battle.
*Do you plan on having the mesh suit’s motions broadcasted to the mech unit, or do you plan for the pilot subject to be within a mech-frame as most current combatants? If broadcast from a remote location, what type of relay, encryption and ion/jamming protections are you considering?
*While I agree, of course, that resources and training are thin at the moment, it takes at least some deeper training and understanding of mech-piloting to maneuver in diverse environments, including zero-gee and aerial combat. Do you think there is a way to compensate for that with your system, or do you believe this equipment will be most (or perhaps only) useful for ground troop fighting forces?
*Have you considered a nerological link system (see ‘Shadow’ – HemmingwayUnitAlphaIteration07,
InterfaceVer3.9 available on access point 001990 of the Blaze of Glory’s intranet)in addition to the hardware, or do you believe this would require too much psychological feedback to an unprepared subject?
*Do you have a basic mecha unit in mind to serve as your base model? I recommend a unit along the lines of an MS-06F Zaku II, or an AV-98 Ingram.
I’ll provide more feedback as I think of it.
March 21st, 2009 at 1:35 am
In the order given:
*That is an excellent idea. As you can tell, I’m not much of a designer when it comes to simple engineering at times. I’m certain that would be possible and much simpler on the pilot.
*The thought had occurred to me soon after this write-up that with such a system a remote setup would be feasible. Due to heavy modifications required for most mass-produced units, the first will certainly be piloted from within. After that we can seek to expand. I believe something like an n-array relay setup with a random hash method set up on each relay would be sufficient in terms of the speed of combat, n being a magnitude of distance.
*My initial thought on a broader concept, actually, was dealing with the issue of ‘how the environment reacts to your mech’, be it enemy or worldly. It would be a fair bit more expensive, but theoretically every cockpit could be a small, basic sim updating based on surroundings. This way, you could ensure that outside interference never desynchronizes the suit from the pilot. With such a method, it would be a simple matter of attach a much more basic console to the unit’s mesh that would control thrust outside of muscle-movement. This interface wouldn’t be too difficult to train a pilot in.
*I have not, as I’ve little exposure to the system. I’ll take a deeper look and get back to you after this.
*My first pick was actually a basic Leo variation. (See http://www.mahq.net/mecha/gundam/w/oz-06ms.htm). Its main perk was its flexibility for being loaded with optional armaments and tools as well as flight and ground capabilities, as well as a fair amount of mobility compared to most models. This decision will likely, however, ultimately fall on whatever the Marshalship decides is adequately producible.
March 22nd, 2009 at 1:32 pm
In going with the idea of a remote system, an inexpensive and simple prototype of your model might be easiest to set up with a gunner drone. Your subject’s suit would appear along these lines: Mech Interface Protosuit
And relay via remote to a gunner droid much like: Gun Pod
Or if you’d like the more humanoid hardware, simply add a basic arm frame and attach the gun barrels to approximate the feel of pulling the trigger.
I think this may undermine your idea for a resource-friendly system. However…
Please do, and get back to me, I think a mix of your simulation center technology and the nerolinksys may be the most resource-friendly answer to the problem.
March 24th, 2009 at 9:52 pm
Great news! I got in contact with those in charge of the colony on Seron and was able to work out an agreement to test our first prototypes!
Speaking of, I spent a good deal of time today looking over the neural system you sent. To be honest, I’m never quite to comfortable working with such subjects. Reading from a mind and inputting to a mind are two terribly different things, and if we’re working with any arbitrary recruit, its something I’m loathe to dive too far into. I took a bit of a different approach, though, and I believe you were right.
Take a look at this first design as well as the added schematics I’m sending you now. Underneath is a lining of the protosuit you sent information on. I’ve restricted the input so that the pilot recoils from attack, but removed the restriction for the suit’s outer sensor points. I think I can compromise on a pilot that only receives minimal pain sensory – it is natural, to be blunt. The H.U.D. in the cockpit, in turn, is just fitted with a holo-interface without the requirement of a full sim environment.
After your review I’m going to send a final print to a friend of mine in the CTI who has access to a few mechanoid skeletal models and see about implementing one with the system before the Blaze’s next departure from Gatekeeper. If it functions under reasonable parameters, I’ll order a full set to be engineered awaiting the Seron crew’s request.
From feedback there, we’ll have enough input to focus on upgrading the unit to full combat readiness without the risk of sending our initial prototypes to a hostile environment.